Import Data
Errors, help and logging information during import / export is shown in the `Info` area. Check this output, if nothing is imported. Probably the default width and height values are not set (see below).
General
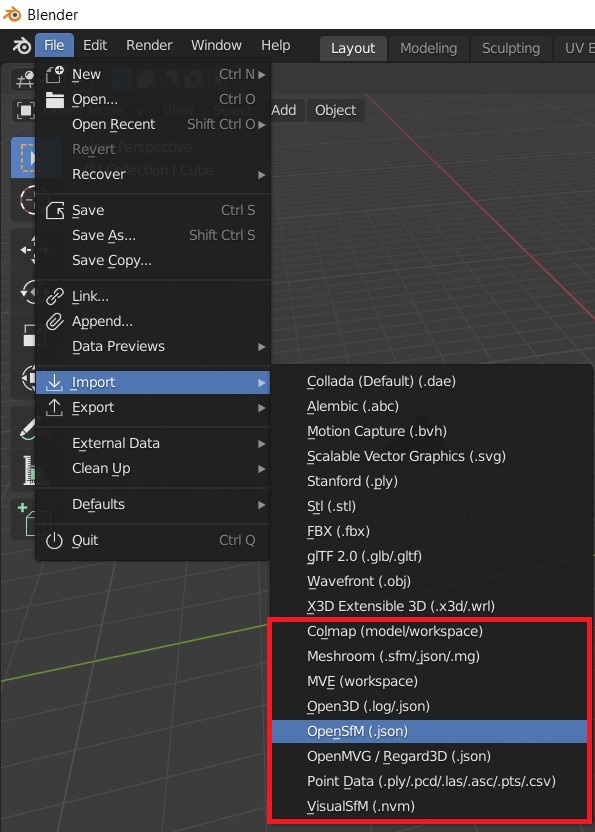
In Blender use File/Import/<Import Function> to import the corresponding file.
For each camera one can add the corresponding image plane. Pillow is required to read the images from disc. Use the import dialog to adjust the image path. By default the addon searches for the images in the folder where the reconstruction file is located. This addon uses the node system of Cycles to visualize the image planes. Thus, the addon switches automatically to Cycles, if image planes are added.
There is an option to represent the point cloud with a particle system. This allows you to render the point cloud. A single texture is used to store the color of all particles. The color of the points / textures of the images are visible, if “Cycles Render” is selected and the 3D view is set to “Material”. Eevee does not (yet) support particle info nodes. (Checkout the manual for more information.) Thus, it is currently not possible to render point clouds with individual particle colors in Eevee.
VisualSfM
The addon automatically looks for the fixed calibration line in the NVM file (i.e. NVM_V3 FixedK fx cx fy cy r (first line)).
Without the fixed calibration line the addon assumes that the principal point is at the image center. NVM files contain no information about the size of the images. Use the import dialog to adjust the image path to automatically read the image size from disc or set the default width and height values.
OpenMVG JSON
The OpenMVG JSON files contain no color information. If you want to import a point cloud with color information, you might want to use the openMVG_main_ComputeSfM_DataColor tool (see this link) and import the corresponding *.ply file.
Meshroom
By default Meshroom stores the Structure from Motion results (i.e. cameras and points) in Alembic (*.abc) files. Since parsing *.abc files requires building additional (heavy) dependencies, e.g. this library, it is currently not supported by this addon.
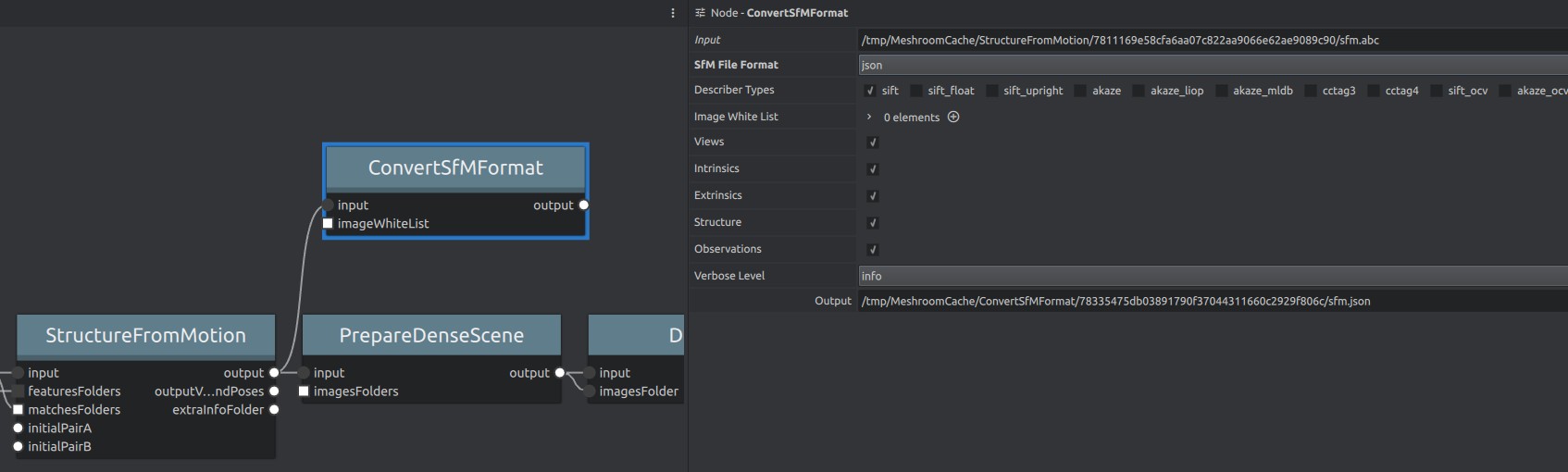
However, one can add a ConvertSfMFormat node in Meshroom (see image below) to write the reconstruction result to *.SfM / *.json files.
In addition to *.SfM / *.json files the addon allows to import *.mg files, which allows to also import corresponding meshes.
The addon prioritizes the output of recently added nodes (e.g. ConvertSfMFormat3 has a higher priority than ConvertSfMFormat).
For importing meshes the addon uses the following prioritization: first the output of Texturing, then the output of Meshfiltering and finally the output of Meshing.
After adding the nodes (e.g. ConvertSfMFormat ), do not forget to save your project (i.e. the *.mg file), since the addon uses this file to determine available reconstruction results.
In order to import the original images corresponding to the *.mg file, one can set the import option Image File Path Type of the Blender-Addon to Absolute Path.
To import the undistorted *.exr images set Image File Path Type to File Name and set Image Directory to the folder with the *.exr files.
Regard3D
By default Regard3D stores the Structure from Motion results in path/to/project/pictureset_0/matching_0/triangulation_0/sfm_data.bin. Use OpenMVG to convert the *.bin to a *.json file with openMVG_main_ConvertSfM_DataFormat -i path/to/sfm_data.bin -o path/to/cameras.json. For Windows you can find the pre-built binaries of OpenMVG here.
ASCII
Each line in an ASCII file (.asc/.pts/.csv) represents a point with several attributes (coords, normals, colors, …).
In the case of .asc/.pts/ there might be an optional header such as //X Y Z Rf Gf Bf Intensity or //X Y Z Intensity R G B that defines the order of the attributes.
If no header is provided, the addon tries to estimate the order of the attributes.
The color attributes can be defined as integer values (R G B) between 0 and 255 or float values (Rf Gf Bf) between 0.0 and 1.0.
Attributes other than position and color are ignored by the addon.
Meshes
In order to view a reconstructed mesh with the corresponding sparse reconstruction (cameras and point cloud) import the files separately. When importing *.obj files make sure to adjust the corresponding import transform options. Set the Forward option to Y Forward and the Up option to Z Up.
Limitations
Blender supports only global render settings (which define the ratio of all cameras). If the reconstruction file contains cameras with different aspect ratios, it is not possible to visualize the camera cones correctly. Furthermore, radial distortions of the camera model used to compute the reconstruction will result in small misalignment of the cameras and the particle system in Blender.